Overview

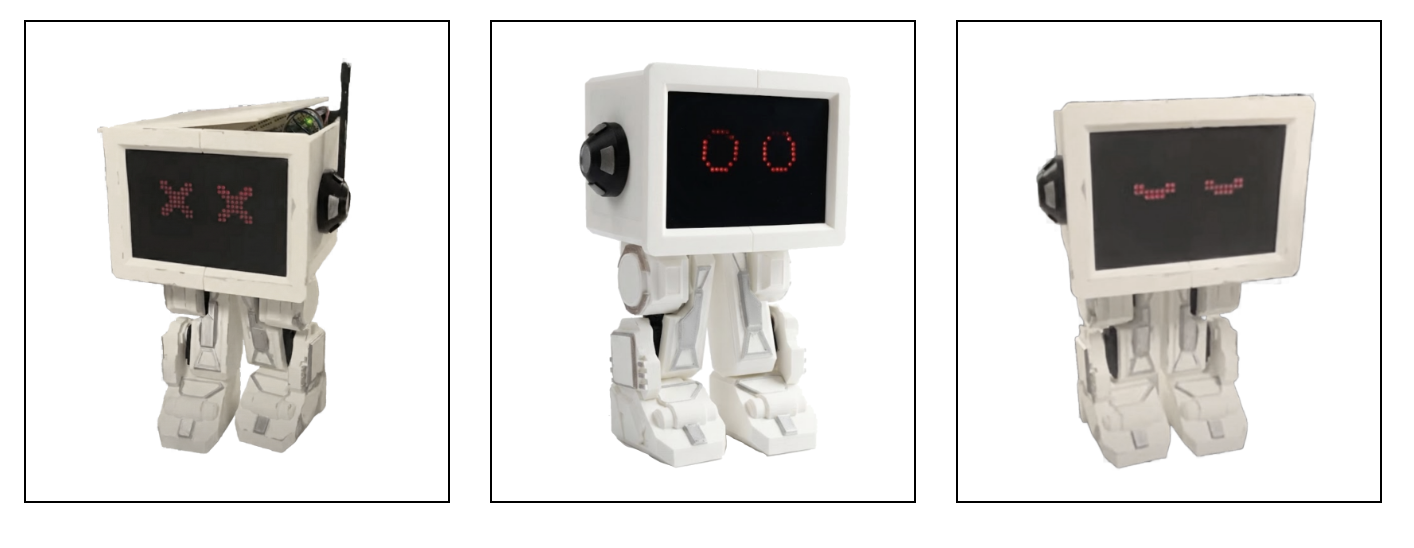
Bebe robot prototype beauty shot on a workbench
Mechanical Design & CAD
Bebe's mechanical structure was designed by me using Fusion CAD software. The design prioritizes stability and balance while maintaining a compact form factor suitable for the Pico W controller and power systems. We also used Fusion (our CAD software of choice)'s center of gravity tool to check stability. A major pain-point was the budget though, so we were unable to design any too fancy robot joints.
All of Bebe's components were 3D printed using PLA filament, allowing for precise fabrication of the joint structures and body frame. The 3D printing process enabled rapid iteration during the design phase, which made it easy to test different joints and refine the robot's form factor.
The robot uses six MG996R servos at the hip, knee, and ankle joints. Walking is implemented as a sequence of stable open-loop PWM poses that keep the center of mass within a safe region for shuffling steps and turns. We also made it dance in the same way.
We honestly could've done much better with the mechanical design as the orientation of the servos made it hard for the robot to walk, but time and 3D-printer constraints were an issue.
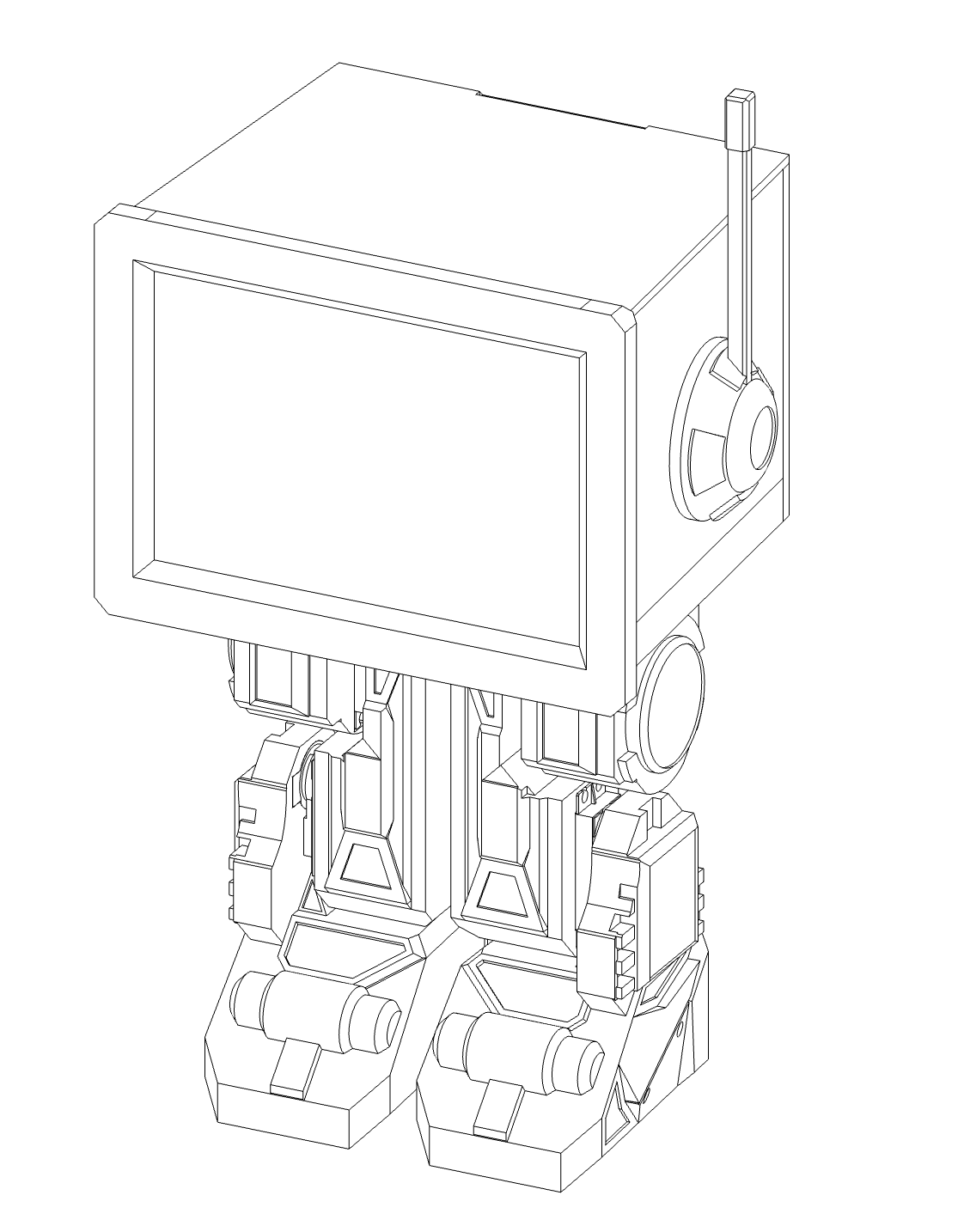
Fusion 360 CAD wireframe design of the bipedal robot

3D printed PLA leg test assembled with MG996R servos
Open-loop walking gait test
Wand Control & IMU
The handheld wand runs on another Pico W with an MPU6050 IMU. A complementary filter converts tilt into direction and activation magnitude, then streams commands over Wi‑Fi via UDP.
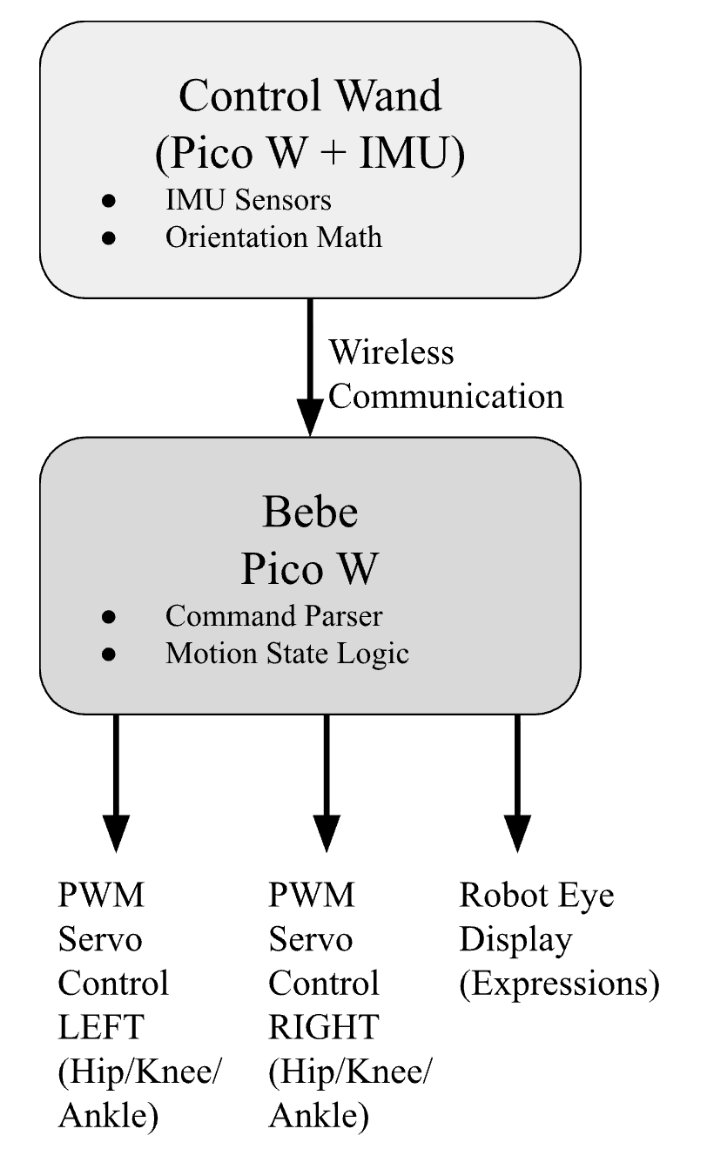
System block diagram for UDP wireless wand control
Eyes & Expression
Two MAX7219 LED matrices render animated eyes that cycle through idle, blink, and expressive patterns, making Bebe’s internal state legible while motion control runs independently.
MAX7219 8x8 LED matrix display example
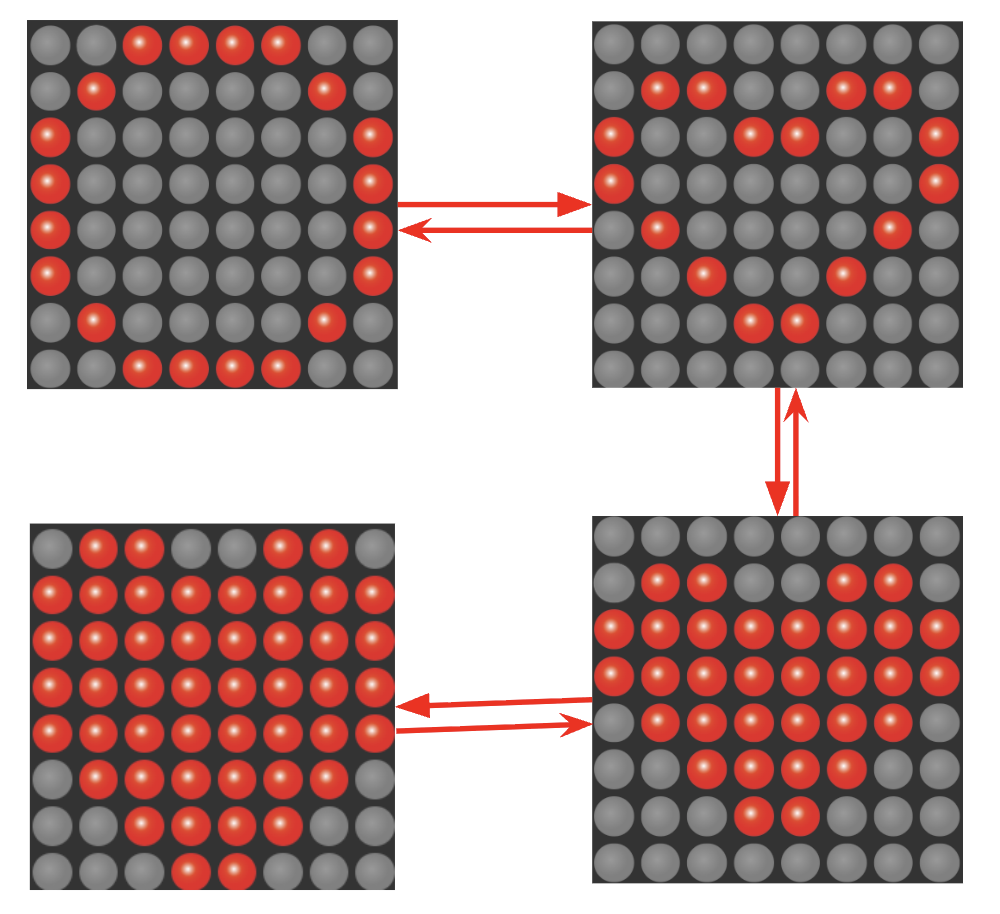
Custom LED grid eye animation frames